Introducitn Vectors
According to Merriam-Webster, the term vector stems from the past participle of Latin vehere "carry, convey". Mathematically, it denotes a tuple of numbers, e.g.
The set of all vectors of length \(n\), where \(n\) is a positive integer, is called the \(n\)-dimensional Euclidean Space
In this course, we focus on \(\mathbb{R}^2\) (\(2\)-vectors) and \(\mathbb{R}^3\) (\(3\)-vectors). Each \(2\)-vector uniquely corresponds to a point on the plane; similarly, each \(3\)-vector uniquely corresponds to a point in the space.
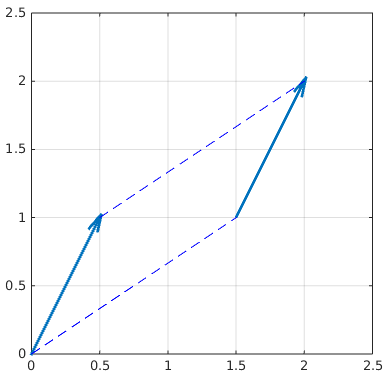
Figure 1. a vector is determined only by its direction and magnitude, not its starting point
We consider a vector as a direction plus a magnitude, often represented as an arrow. We do not care where the arrow starts. If two arrows with equal length are parallel to each other, they are considered as the same vector even if their starting points are different. Equivalenty speaking, we allow vectors to "freely parallel-translate".
Vector Operations
Given vectors \(\vec{v}=\left(v_1,v_2,v_3\right)\), \(\vec{w}=\left(w_1,w_2,w_3\right)\), we define their sum as
For any real number \(c\in \mathbb{R}\), define the scalar multiplication of \(c\) and \(\vec{v}\) as
With these two basic operations in mind, it is straightforward to define any linear combination of vectors, for instance
Properties of the sum and the scalar multiplication includes the following:
All these formulae can be directly verified using \eqref{eq:sum} and \eqref{eq:scalar_mult}.
The dot product (a.k.a. scalar product or inner product) of two vectors \(\vec{v}=\left(v_1,v_2,v_3\right)\), \(\vec{w}=\left(w_1,w_2,w_3\right)\) is defined as
The name scalar follows from the fact that the result of the product is a scalar.
The following properties of the dot product can be verified directly via \eqref{eq:dot_prod}.
When \(\vec{v}=\vec{w}\), one has
which represents the squared distance from the origin to the point \(\left(v_1,v_2,v_3\right)\). We thus define the magnitude of \(\vec{v}\) as
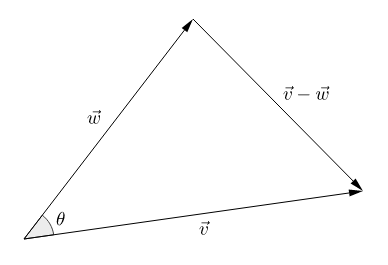
The dot product has a geometric interpretation. Let \(\vec{v}\), \(\vec{w}\) be as in the figure on the right, and denote \(\theta\) for the angle between \(\vec{v}\) and \(\vec{w}\). We have the following
Theorem 1. \(\vec{v}\cdot\vec{w} = \left|\vec{v}\right|\left|\vec{w}\right|\cos\theta\).
Proof. Without loss of generality, assume \(\vec{v}\), \(\vec{w}\) are \(3\)-vectors. For the \(2\)-vector case, simply treat the last coordiantes of \(\vec{v}\) and \(\vec{w}\) as \(0\).
The triangle on the right consists of three edges of length \(\left|\vec{v}\right|\), \(\left|\vec{w}\right|\), \(\left|\vec{v}-\vec{w}\right|\). By the Law of Cosines, one has
Note that
thus the left hand side of the law of cosines can be written as
which yields
and the conclusion follows immediately. \(\blacksquare\)
Theorem 1 builds the connection between dot product and the angle between two vectors. More specifically,
If \(\vec{v}\cdot\vec{w}=0\), \(\vec{v}\) and \(\vec{w}\) are said to be orthogonal or perpendicular to each other. When \(\left|\vec{v}\right|\neq0\) and \(\left|\vec{w}\right|\neq0\), this happens if and only if \(\cos\theta = 0\).
The last important notion related to dot product is component. The component of a vector \(\vec{v}\) along another vector \(\vec{w}\) is defined as
Note that \(\mathrm{comp}_{\vec{w}}\vec{v}\) can be understood as the dot product between \(\vec{v}\) and a unit vector \(\vec{w}\big/\left|\vec{w}\right|\). In particular, if we choose \(\vec{w}\) to be one of the following three unit vectors
then
which are often referred to as the \(x\)-component, \(y\)-component, and \(z\)-component of \(v\), respectively.
The cross product (a.k.a. vector product or outer product) of two \(3\)-d vectors \(\vec{v}=\left(v_1,v_2,v_3\right)\), \(\vec{w}=\left(w_1,w_2,w_3\right)\) is defined as
The name vector follows from the fact that the result of the product is a vector. Formally, \(\vec{v}\times\vec{w}\) can be defined as the following determinant
From either definitions, one has
and in particular
By definition, it is straightforward to verify that \(\vec{v}\times\vec{w}\) is orthogonal to both \(\vec{v}\) and \(\vec{w}\). For instance,
In other words, \(\vec{v}\times\vec{w}\) is orthogonal to the plane spanned by \(\vec{v}\) and \(\vec{w}\), or equivalently, \(\vec{v}\times\vec{w}\) is a normal vector of that plane.
We would like to determine the direction and magnitude of \(\vec{v}\times\vec{w}\). The magnitude can be directly computated.
Theorem 2. \(\left|\vec{v}\times\vec{w}\right|^2=\left|\vec{v}\right|^2\left|\vec{w}\right|^2-\left|\vec{v}\cdot\vec{w}\right|^2\).
Proof. Note that
\(\blacksquare\)
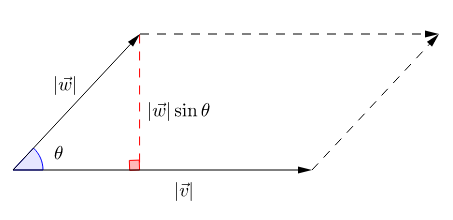
Corollary 1. Let \(\theta\) denote the angle between \(\vec{v}\) and \(\vec{w}\). Then
Proof. Recall from Theorem 1 that \(\vec{v}\cdot\vec{w}=\left|\vec{v}\right|\left|\vec{w}\right|\cos\theta\). Thus by Theorem 2
The result then follows from taking square roots. \(\blacksquare\)
Corollary 2. If \(\vec{v}\) and \(\vec{w}\) are collinear, then \(\vec{v}\times\vec{w}=0\).
Remark. Corollary 1 implies that \(\left|\vec{v}\times\vec{w}\right|\) equals to the area of the parallelogram spanned by \(\vec{v}\) and \(\vec{w}\).
To facilitate describing the direction of \(\vec{v}\times\vec{w}\), let us introduce the one last vector operations, the scalar triple product (a.k.a. mixed product or box product). For three \(3\)-d vectors \(\vec{u}\), \(\vec{v}\), \(\vec{w}\) (the order matters!), define their scalar triple product as
Theorem 3. The scalar triple product can be written in determinant form
Proof. Recall from the definition of the cross product that
thus
\(\blacksquare\)
Corollary 3.
Proof. Use the properties of the determinant. \(\blacksquare\)
Definition. An ordered vector triple \(\vec{u}, \vec{v}, \vec{w}\) is said to form a right-handed triple if
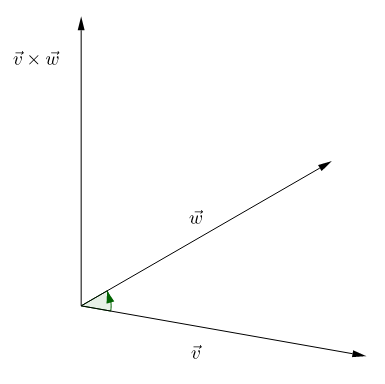
Theorem 4. If \(\vec{v}\times\vec{w}\neq 0\), the ordered triple \(\vec{v},\vec{w},\vec{v}\times\vec{w}\) forms a right-handed triple.
Proof. By Theorem 3, it suffices to show that
To see why this is true, use Corollary 3:
where the last strict positivity follows from the assumption that \(\vec{v}\times\vec{w}\neq 0\). \(\blacksquare\)
The fact that \(\vec{v}, \vec{w}, \vec{v}\times\vec{w}\) form a right-handed triple suggests that we can determine the direction of \(\vec{v}\times\vec{w}\) using the Right-hand Rule, as illustrated in the figure above. It can also be deduced directly from this geometric picture that
For this reason, sometimes people interprete \(\vec{v}\times\vec{w}\) as the "signed area" of the parallelogram spanned by \(\vec{v}\) and \(\vec{w}\).
The last important point for vectors is the geometric interpretation of the scalar triple product. In fact, \(\vec{u}\cdot\left(\vec{v}\times\vec{w}\right)\) equals to the "signed volume" of the parallelepiped spanned by the three vectors \(\vec{u},\vec{v},\vec{w}\), as explained in Figure 2.
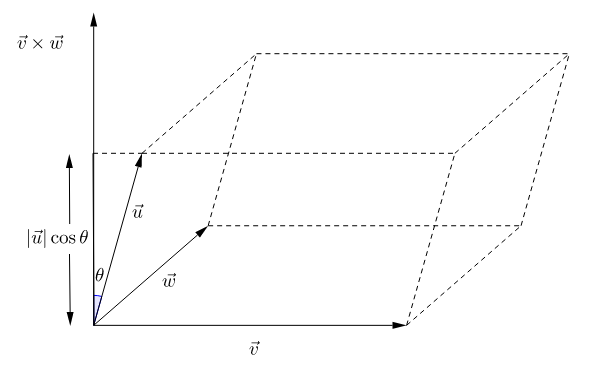
Figure 2. scalar triple product equals to the "signed volume" of the parallelepiped
To understand this picture, note that
The sign of the "signed volume" only depends on the left- or right-handedness of the ordered triple \(\vec{u},\vec{v},\vec{w}\). Note that the triples
all have the same handedness, thus it is clear from this geometric interpretation that